-
Finalist: Generative AI Innovation Award, #empowHeraccess 2024, Women in Cloud
Honored to be a finalist for Generative AI Innovation empowHeraccess Award by Women in Cloud.
-

Published in Women in Technology: Joining Gait Training While Working on a Navigation Assistant Device for the Visually Impaired
https://medium.com/womenintechnology/joining-gait-training-while-working-on-a-navigation-assistant-device-for-the-visually-impaired-2c6810e56d45
-
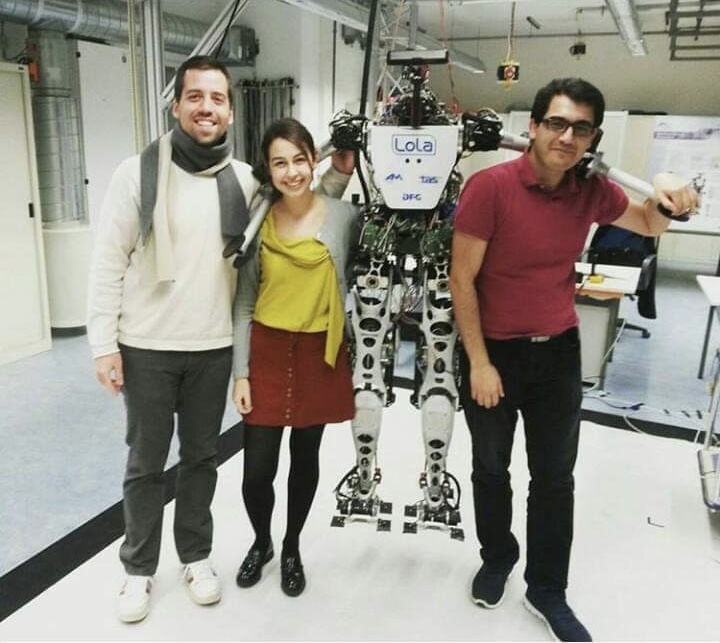
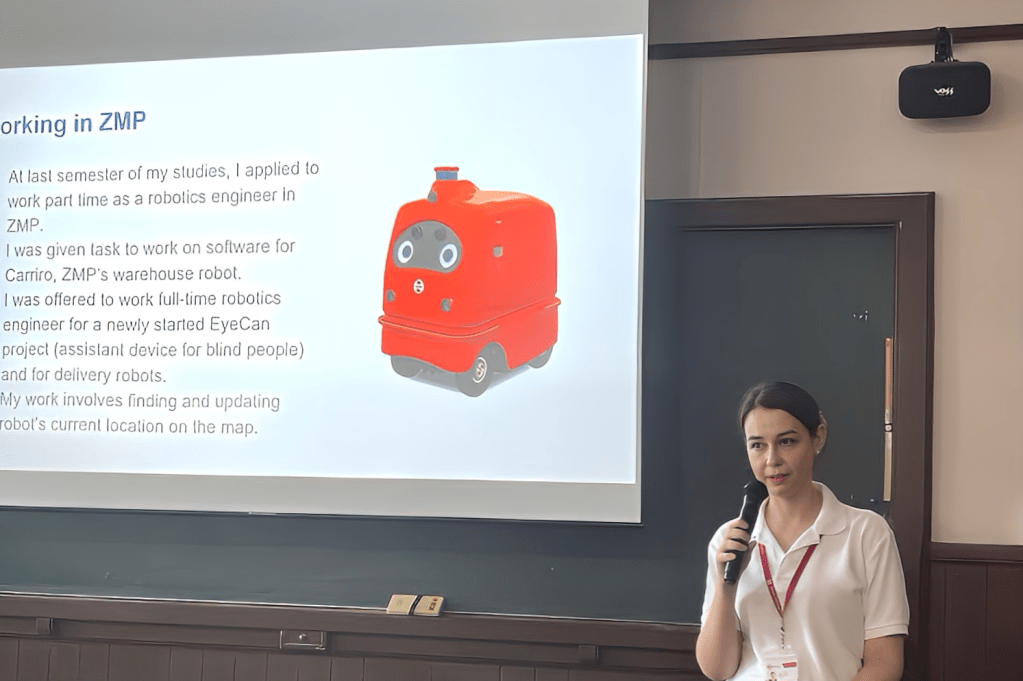
Humanoid Robot Lola Days – Technical University of Munich (TUM)
Here is a photo with humanoid robot Lola from Technical University of Munich (TUM), Germany. I contributed to this project as a research assistant during my studies, focusing on the surface recognition task.
-

Published Journal Paper: Data Fusion for Sparse Semantic Localization Based on Object Detection
Semantic information has started to be used in localization methods to introduce a non-geometric distinction in the environment. However, efficient ways to integrate this information remain a question. We propose an approach for fusing data from different object classes by analyzing the posterior for each object class to improve robustness and accuracy for self-localization. posterior…
-

Featured
Top 50 Asia Women Tech Leaders 2025
Read more →: Top 50 Asia Women Tech Leaders 2025Honoured to be named a Top Asia Women Tech Leader. The award ceremony in Singapore was amazing, held at the Marina Bay Sands Convention Centre. Grateful to be part of such an inspiring community. Top 50 Asia Women Tech Leaders…